Ճշգրիտ Servo DC շարժիչ 46S/12V-8A1

Servo DC շարժիչի հիմնական առանձնահատկությունները. (այլ մոդելներ, կատարումը կարող է հարմարեցվել)
| 1. Գնահատված լարումը: | DC 12V | 5. Գնահատված արագություն: | ≥ 2600 rpm |
| 2. Գործող լարման միջակայք. | DC 7.4V-13V | 6. Արգելափակման հոսանքը: | ≤2.5A |
| 3. Գնահատված հզորություն: | 25 Վտ | 7. Բեռնման հոսանքը: | ≥1A |
| 4. Պտտման ուղղություն: | CW ելքային լիսեռը վերևում է | 8. Լիսեռի մաքրում: | ≤1,0 մմ |
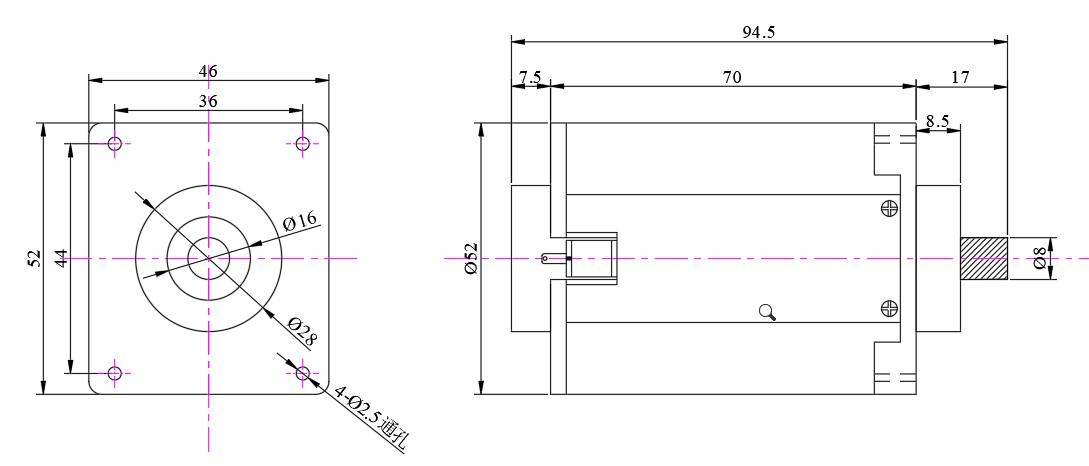
Արտադրանքի տեսքի դիագրամ
Ժամկետի ժամկետը
Արտադրության օրվանից ապրանքի անվտանգ օգտագործման ժամկետը 10 տարի է, իսկ շարունակական աշխատանքային ժամանակը ≥ 2000 ժամ:
Ապրանքի Նկարագրություն
1. Կոմպակտ, տարածություն խնայող դիզայն;
2. Գնդակակիր կառուցվածք.
3. Խոզանակի երկար սպասարկման ժամկետը.
4. Խոզանակների արտաքին մուտքը թույլ է տալիս հեշտ փոխարինել շարժիչի կյանքը հետագայում երկարացնելու համար:
5. Բարձր մեկնարկային ոլորող մոմենտ;
6. Դինամիկ արգելակում ավելի արագ կանգնելու համար.
7. Շրջելի ռոտացիա;
8. Պարզ երկլարային միացում;
9. F դասի մեկուսացում, բարձր ջերմաստիճանի եռակցման կոմուտատոր:
10. Ցածր աղմուկի և կայուն շահագործման դեպքում այն հատկապես հարմար է այն դեպքերի համար, որոնք պահանջում են բարձր արագություն և ցածր աղմուկ:
Դիմումներ
Այն լայնորեն օգտագործվում է խելացի տան, ճշգրիտ բժշկական սարքերի, ավտոմոբիլային շարժիչի, սպառողական էլեկտրոնիկայի արտադրանքի, մերսման և առողջության պահպանման սարքավորումների, անձնական խնամքի գործիքների, ռոբոտի խելացի փոխանցման, արդյունաբերական ավտոմատացման, ավտոմատ մեխանիկական սարքավորումների, թվային արտադրանքի և այլնի ոլորտներում:
Կատարման նկարազարդում



Որոնք են DC servo շարժիչի բնութագրերը
DC servo շարժիչում կա ուղղակի հոսանք (DC) դրական և բացասական տերմինալներով:Այս տերմինալներից յուրաքանչյուրի միջև հոսանքը հոսում է ճիշտ նույն ուղղությամբ:Սերվո շարժիչի իներցիան պետք է ավելի փոքր լինի ճշգրտության և ճշգրտության համար:DC սերվոներն ունեն արագ արձագանք, որը ձեռք է բերվում ոլորող մոմենտ-քաշի բարձր հարաբերակցության պահպանմամբ:Բացի այդ, DC servo-ի արագության բնութագրիչը պետք է լինի գծային:
DC servo շարժիչով ընթացիկ կառավարումը շատ ավելի պարզ է, քան AC servo շարժիչի դեպքում, քանի որ հսկողության միակ պահանջը ընթացիկ արմատուրայի մեծությունն է:Շարժիչի արագությունը վերահսկվում է աշխատանքային ցիկլի վերահսկվող զարկերակային լայնության մոդուլյացիայի միջոցով (PWM):Վերահսկիչ հոսքը օգտագործվում է ոլորող մոմենտ կառավարելու համար, ինչը հանգեցնում է հուսալի հետևողականության գործունեության յուրաքանչյուր ցիկլի ընթացքում:
DC servo շարժիչները հակված են ավելի մեծ իներցիա, քան squirrel-cage AC շարժիչները:Սա և խոզանակի շփման դիմադրության բարձրացումն այն հիմնական գործոններն են, որոնք կանխում են դրանց օգտագործումը գործիքների սերվոներում:Փոքր չափսերում DC սերվո շարժիչները հիմնականում օգտագործվում են օդանավերի կառավարման համակարգերում, որտեղ քաշի և տարածության սահմանափակումները պահանջում են, որ շարժիչը թողարկի առավելագույն հզորություն մեկ միավորի ծավալի համար:Դրանք սովորաբար օգտագործվում են ընդհատվող աշխատանքի համար կամ որտեղ պահանջվում է անսովոր բարձր մեկնարկային ոլորող մոմենտ:DC սերվո շարժիչները կարող են օգտագործվել նաև էլեկտրամեխանիկական ակտուատորների, գործընթացի կարգավորիչների, ծրագրավորման սարքավորումների, արդյունաբերական ավտոմատացման ռոբոտների, CNC հաստոցային սարքավորումների և նմանատիպ բնույթի շատ այլ ծրագրերում:
DC սերվո շարժիչը չորս հիմնական բաղադրիչներից բաղկացած հավաքույթ է, մասնավորապես՝ DC շարժիչ, դիրքորոշող սարք, փոխանցումատուփ և հսկիչ միացում:DC շարժիչի պահանջվող արագությունը կախված է կիրառվող լարումից:Շարժիչի արագությունը վերահսկելու համար պոտենցիոմետրը արտադրում է լարում, որը կիրառվում է սխալի ուժեղացուցիչի մուտքերից մեկի վրա:







